Convex optimization, QP, SQP
Published:
Definition of convex function
For all ${ 0\leq t \leq 1}$ and all ${ x_{1},x_{2}\in X,}$ ${ f\left(tx_{1}+(1-t)x_{2}\right)~\leq ~tf\left(x_{1}\right)+(1-t)f\left(x_{2}\right).}$
Quadratic forms and Convexity
Quadratic form in variables ${ x_1,x_2…, x_n}$ is a polynomial function $Q$, where all the terms in $Q(x_1, x_2,…, x_n)$ have order two. Quadratic functions $\neq$ convex functions.
Let $Q(x_1, x_2,…, x_n)=\boldsymbol{x}^TA\boldsymbol{x}$ be a quadratic form in n variables, $A$ is a symmetric $n \times n$ matrix, then:
- $Q$ is convex/concave $\iff$ $A$ is positive/negative semidefinite
- $Q$ is strictly convex/concave $\iff$ $A$ is positive/negative definite
Quadratic programming (QP)
General form of QP:
\(\underset{x} {\text{min}} \quad x^TGx+x^Tc\)
subject to:
\(a_i^Tx=b_i, i \in \mathcal{E}\)
\(a_j^Tx \geq b_j, j \in \mathcal{I}\)
i.e., a quadratic objective and linear constraints.
For equality-constrained QP: with KKT conditions, we can find the optimal solution \(x^*\) (and \(\lambda^*\) ) by solving the system of linear equations (zero gradient of Lagrangian \(\nabla_x \mathcal{L}(x^*,\lambda^*)=0\) and the active linear constraints \(Ax=b\)). Since there exist efficient method for linear equations, QP is a common modeling choice for practical problems.
QP with inequality constraints can be solved by active-set methods. The core idea is that the optimal solution must lie on boundary or in the interior of the space defined by the inequality constraints. In the former case, these inequality constraints are active and can be treated as equality constraints. In the later case, these inequality constraints are inactive, and the corresponding Lagrangian multipliers are zero.
KKT conditions
KKT conditions are the first-order necessary conditions for a solution to be optimal. The KKT approach generalizes the method of Lagrange multipliers, since it applies to problems with inequality constraints.
Sequential Quadratic Programming (SQP)
SQP is a special case of SCP. Core idea: approximation by QP, and iteratively solve a sequence of QP until convergence.
- At the current solution, approximate the objective with a quadratic function (if it is not), and linearize the nonlinear constraints (keep the linear ones). In addition to the original constraints, we have the trust region constraints to ensure the approximation is reasonable.
- Solve the approximated QP to obtain a new solution, the solution is the start for the next iteration.
- Repeat (1) and (2) at the new solution until some convergence criteria are satisfied.
However, the SQP algorithm has its own cost, which mainly comes from the linearization of the constraints. If it takes too many iterations to converge to a solution, the SQP algorithm may lose some efficiency. [3]
Convex optimization:
- The objective function is convex.
- The constraint functions are convex.
Convex optimization properties:
- A local minima is guaranteed to be a global minima.
- A certificate of infeasibility is provided when a feasible solution does not exist.
- The runtime complexity is polynomial in the problem size [1]. Convex optimization in general is NP hard [2]?
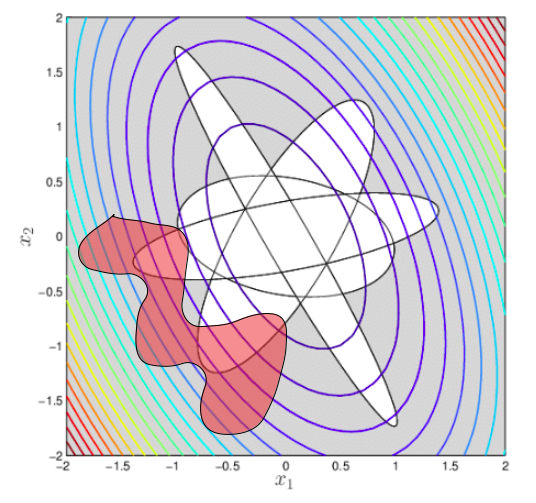
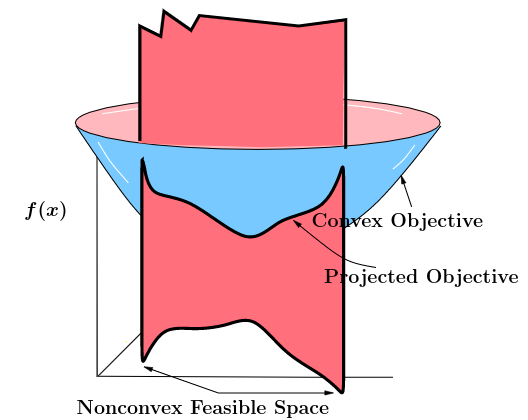
If the objective function is convex but constraint functions are not, then we can not guarantee a local minima to be a global minima due to the feasible region defined by the nonconvex constraints.
The following figure illustrates the optimization for a convex objective function. The white regions are defined by convex constraints and the red region is defined by nonconvex constraints. Intuitively, we understand the local minima within the red region (feasible region of nonconvex constraints) is not necessarily a global minima.
To be continued…
Reference
[1] Danylo Malyuta, et. al, “Convex Optimization for Trajectory Generation”
[2] Manyem, Prabhu. “Duality Gap, Computational Complexity and NP Completeness: A Survey.” arXiv preprint arXiv:1012.5568 (2010).
[3] Bonnans, J. F., Gilbert, J. C., Lemaréchal, C., & Sagastizábal, C. A. (2006). Numerical optimization: theoretical and practical aspects. Springer Science & Business Media.